Pushing software updates
Johann Schmid and I have been working on getting updates to the torque meter software. Small changes but with significant increase in user friendliness.
● Inability to overwrite the data
● Progress bar and a time bar implemented
● It resets the pattern from one period to another. This is of critical importance as this enables one to do basically any kind of experiment on the machine
I have also gotten hold of a free version of LabView. I thought it could be a good idea that we could to small changes ourself to the software. However, my version is 2017 and Mr Schmid mentioned that he will be transferring to LabView 2019, and thereby retiring the 2017 version. A student version of labview is affordable, less than 50 Euros. It could be worth getting a legal licence of this software.
● The A/D converter now connects directly to the PCB. Only problem is that it is inverted, meaning that the signal from the torque machine gives a positive signal it is registered as a negative signal in the software. Mr Schmid is aware of this and will invert the signal in the software, rather than resoldering the PCB connection.
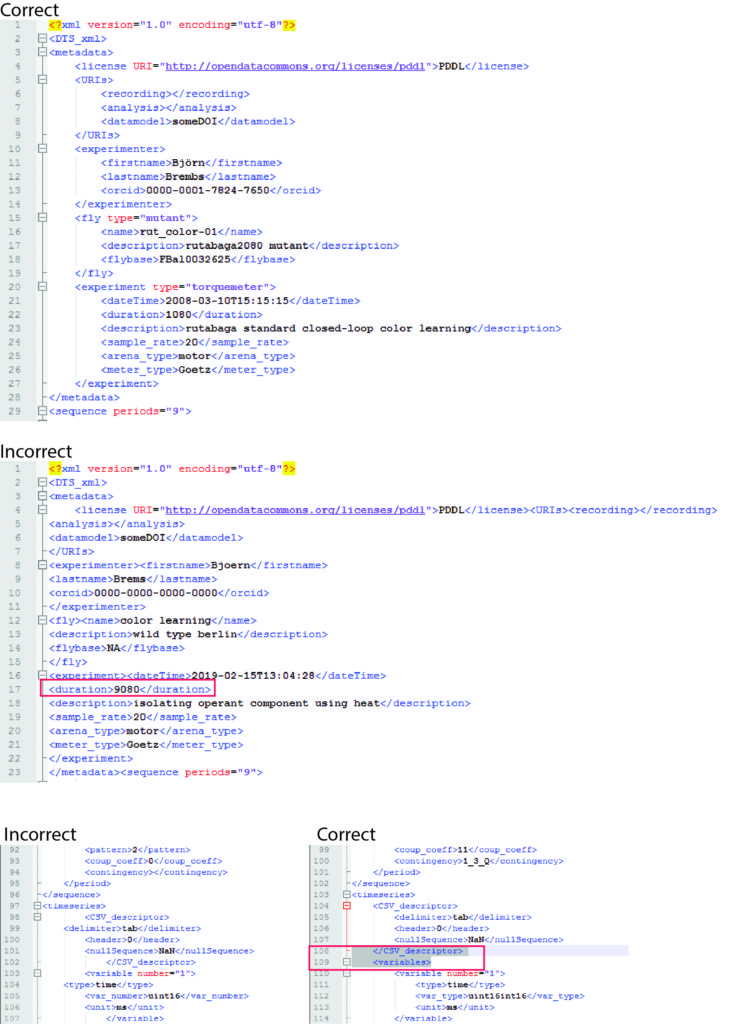
Updates to the DTS
● DTS is now also better compatible wit the new kind of data we are getting. A conflict occurred because of differences in pattern. An easy fix by just ignoring this parameter.
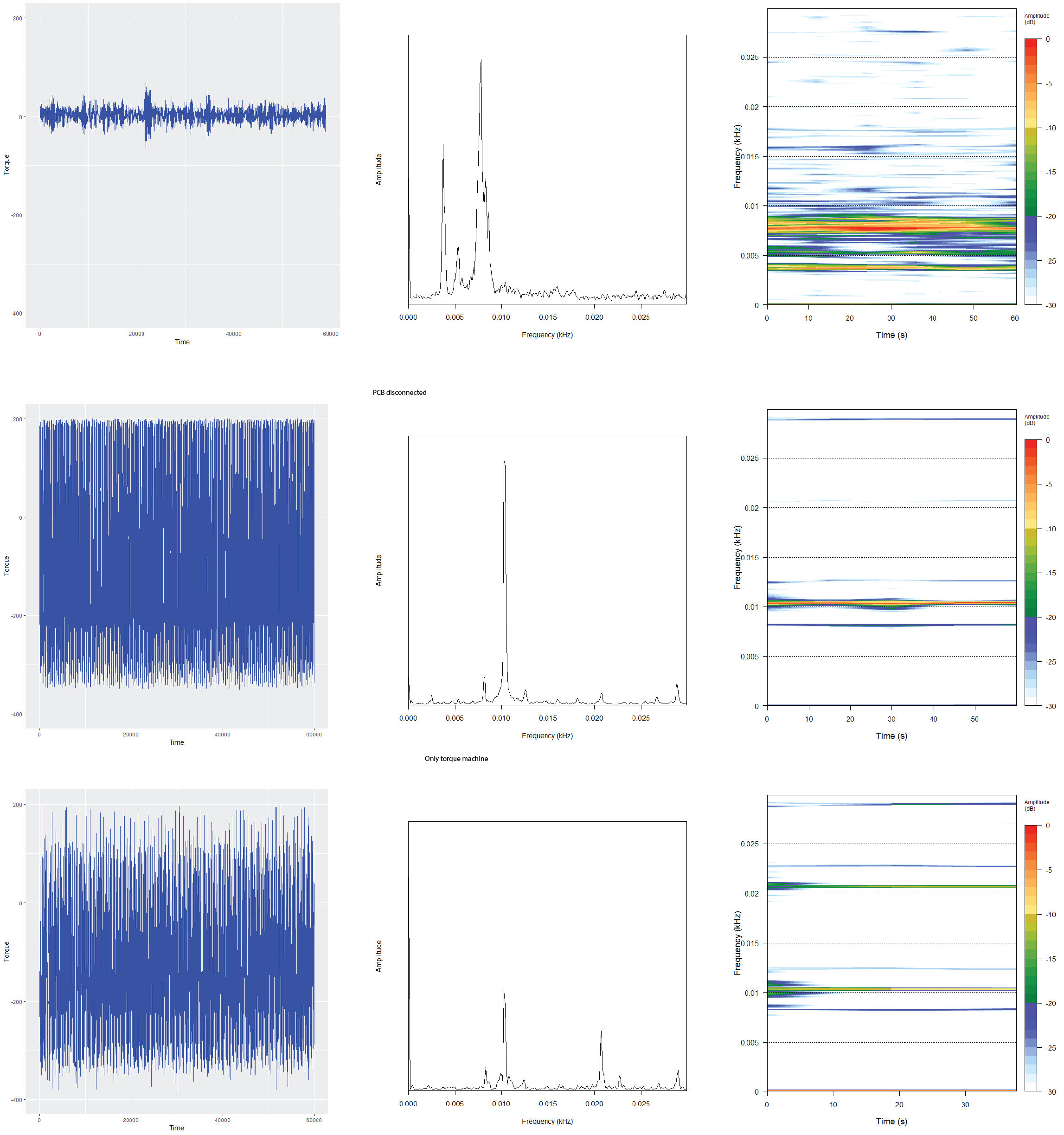
Noise measurements
Three different kind of noises has been measured: Without input from the torquemeter, without input from the PCB and one also with everything connected but the power supply turned off.
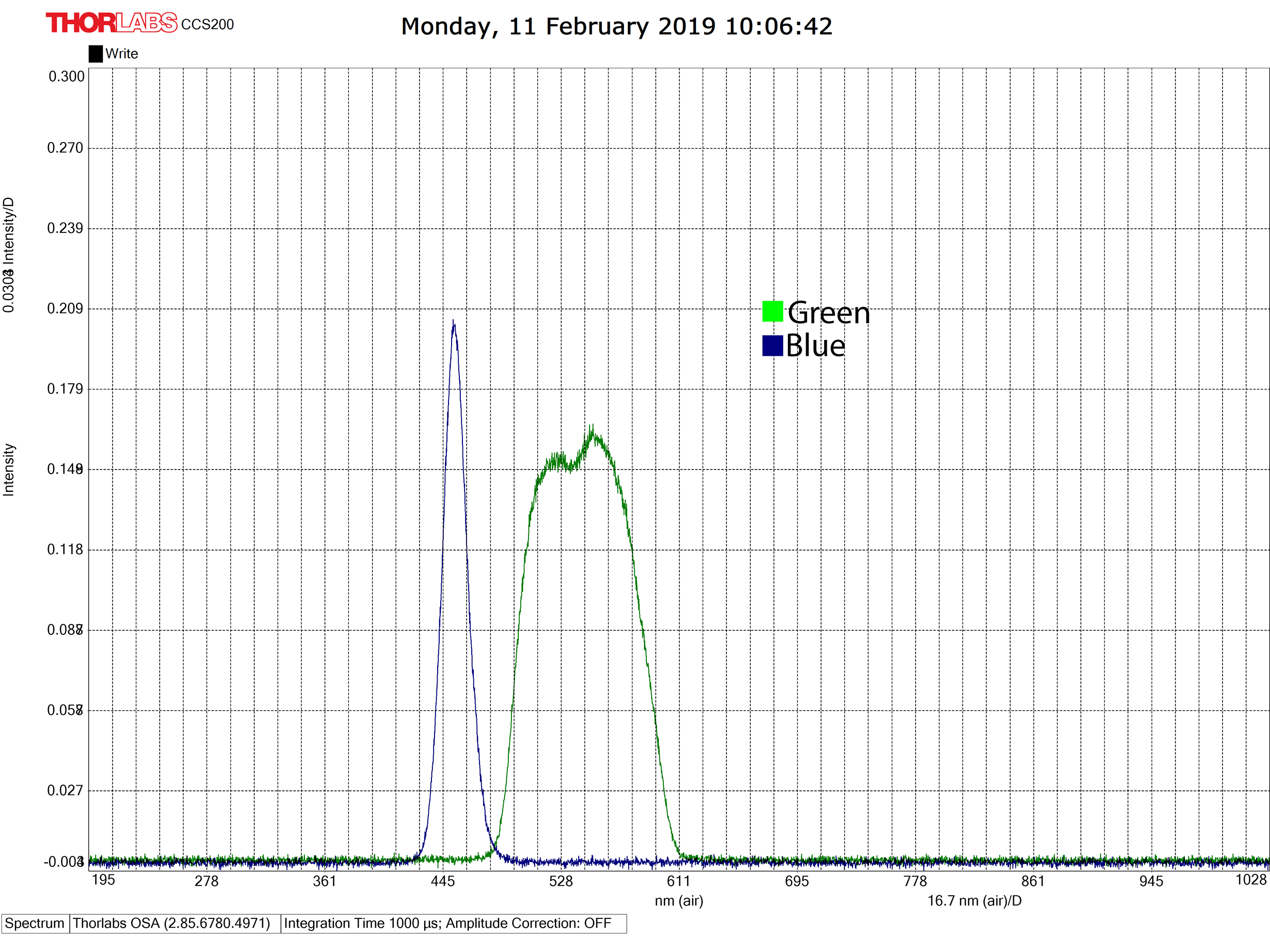
Implementing color learning on projector
Colors have been implemented in the projector. It has been difficult to evaluate due to some bugs in the code:
- The program remembers the most recent color and is not returning to a white background when switching between different colors.
- Only striped pattern seems to be implemented?
These issues have been addressed Johann Schmid and he will update the program accordingly.
The color learning is working as it should. It is changing the color accordingly to the set pattern. Laser is also implemented correctly
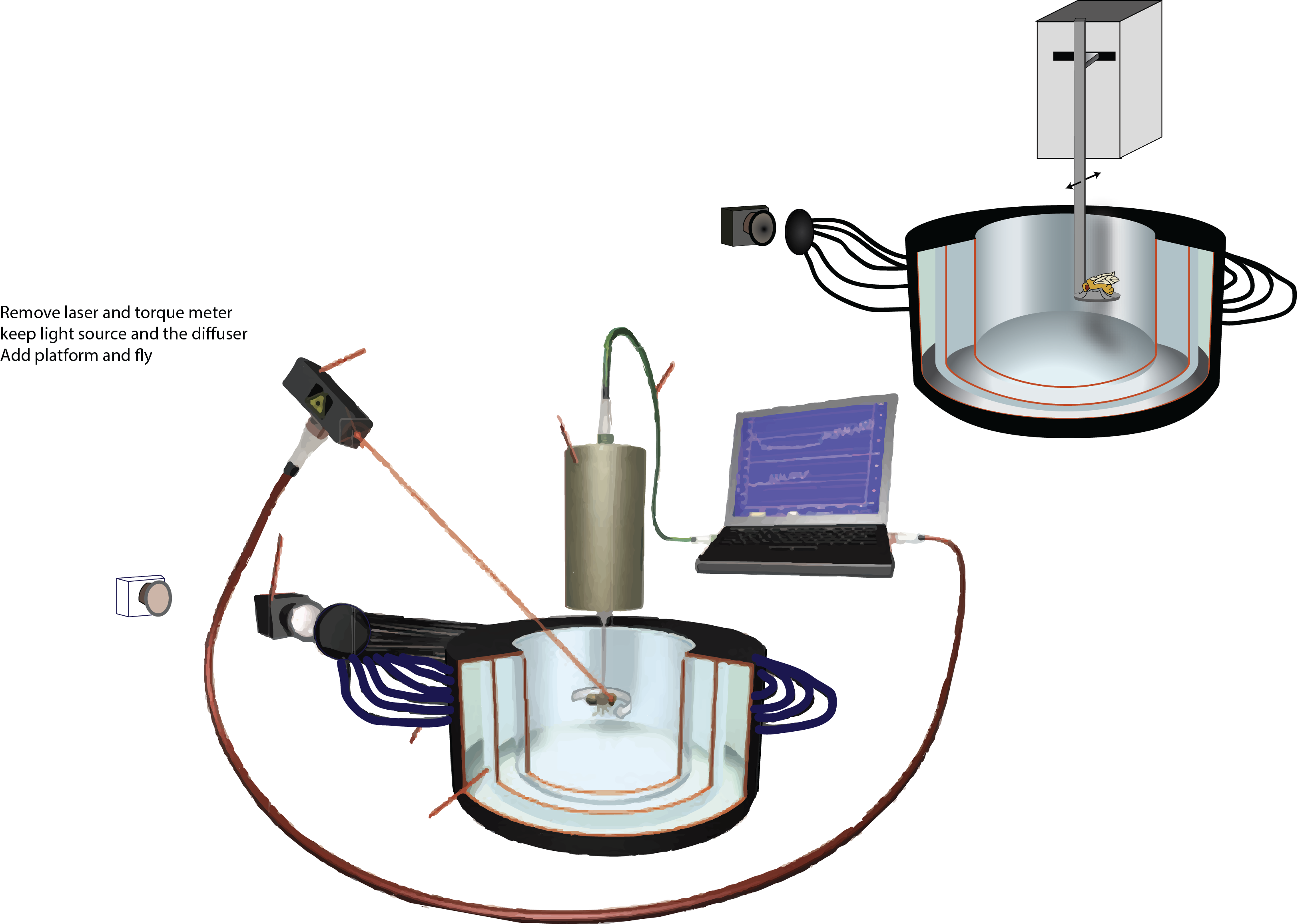
Isolated operant component in the flight simulator
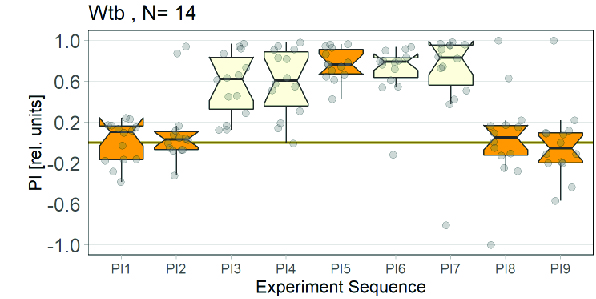
Each period is set to 120 seconds, meaning that the flies are getting a total of 8 minutes of training. The flies are performing two initial pre-tests, one test after 4 minutes of training and two final test periods. For the entire duration of the experiments flies are given a color indication if they are being punished or not as a result of left or right turning, this is a composite learning control. For the final test periods the colors have been removed, meaning that we are isolating the operant component. This is different from the previous tests that has been done where flies were not challenged with colors but just relied on their own behavior to determine which side is being punished. A removal of the helping colors resulted in a lack of preference for left- or right-turning maneuvers.
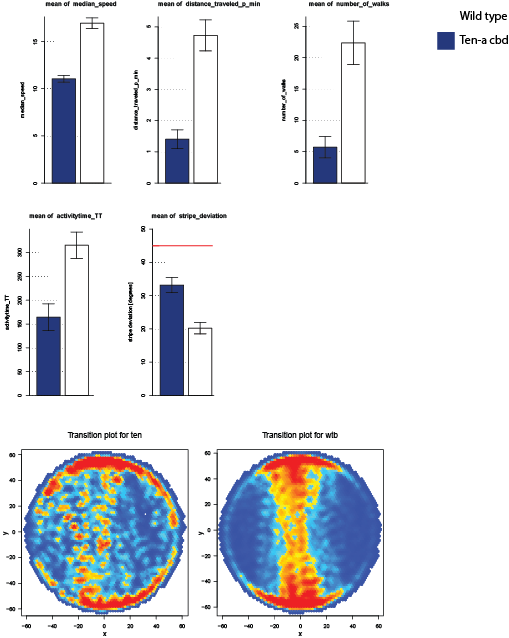
Flight performance Ten-a cbd
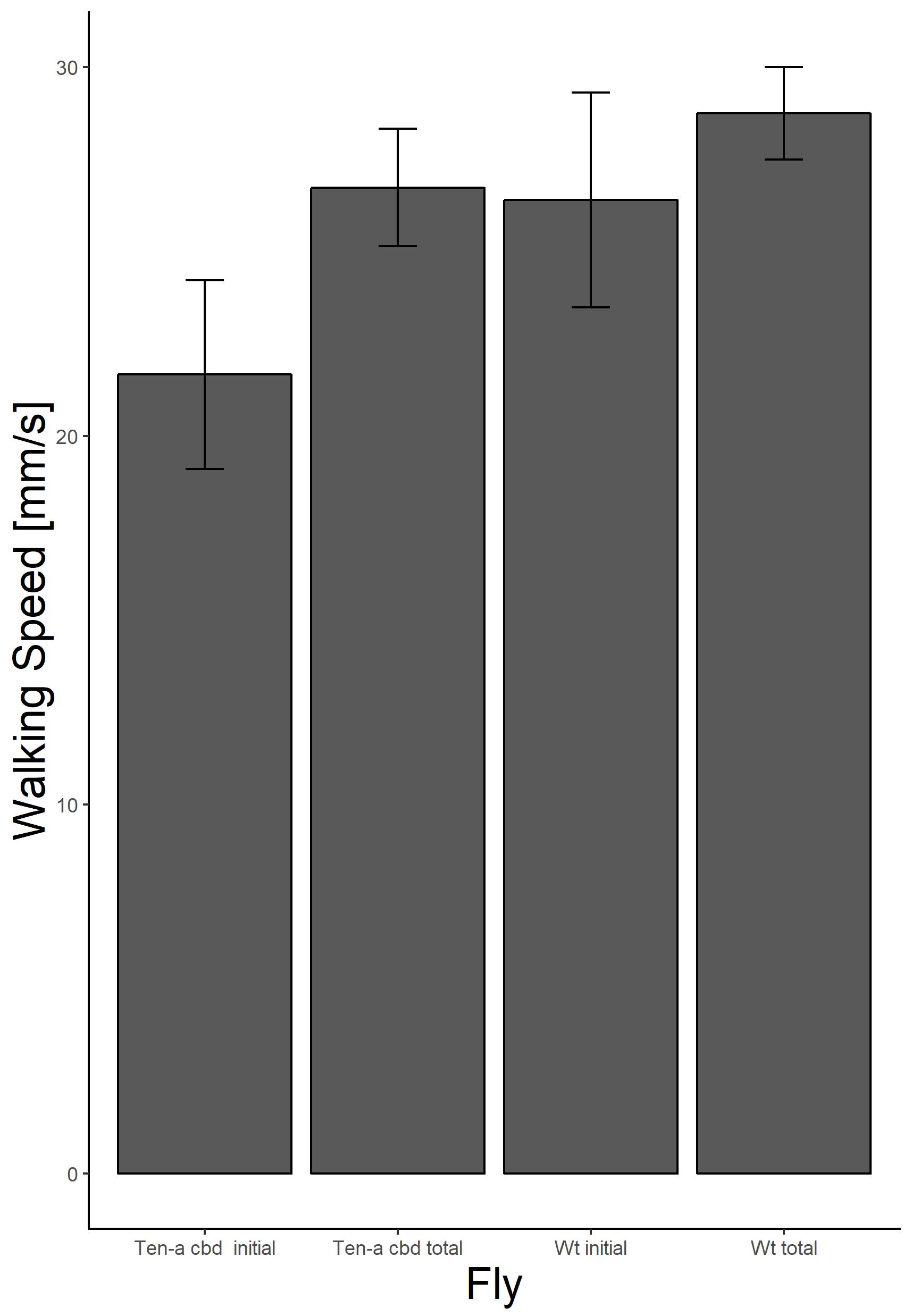
Ten-a cbd buridan