Optimizing the Joystick with Gr28bd+TrpA1>Chrimson
on Monday, May 29th, 2017 12:58 | by Christian Rohrsen
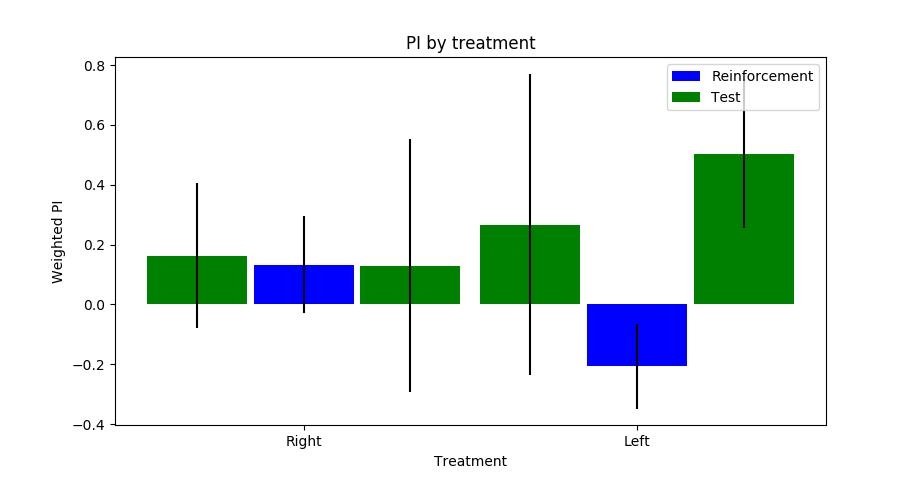
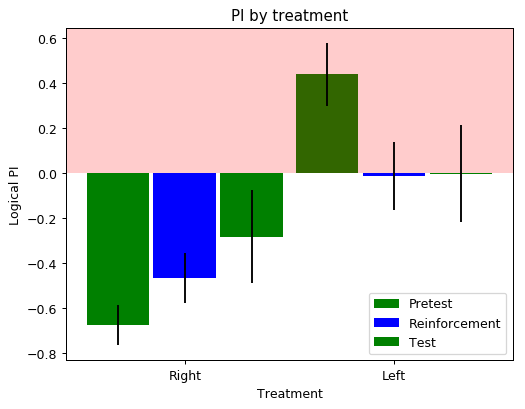 It seems that there is something more there. There were 5 batches of 3 flies per side reinforced. I put the intensity higher than ever before. I will try to get the maximum intensity for the next experiment and see what it looks like.
It seems that there is something more there. There were 5 batches of 3 flies per side reinforced. I put the intensity higher than ever before. I will try to get the maximum intensity for the next experiment and see what it looks like.

Category: neuronal activation, Operant reinforcment, Optogenetics, python code | No Comments
Looking for the phenotype in Gr28bd+TrpA1>Chrimson
on Monday, May 22nd, 2017 3:01 | by Christian Rohrsen
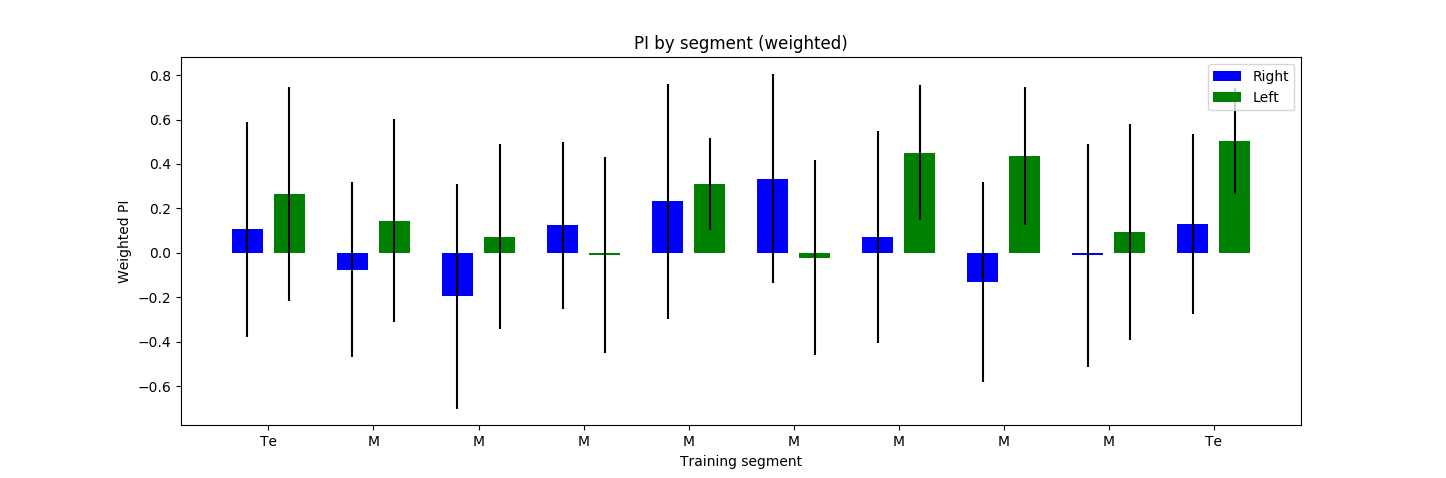
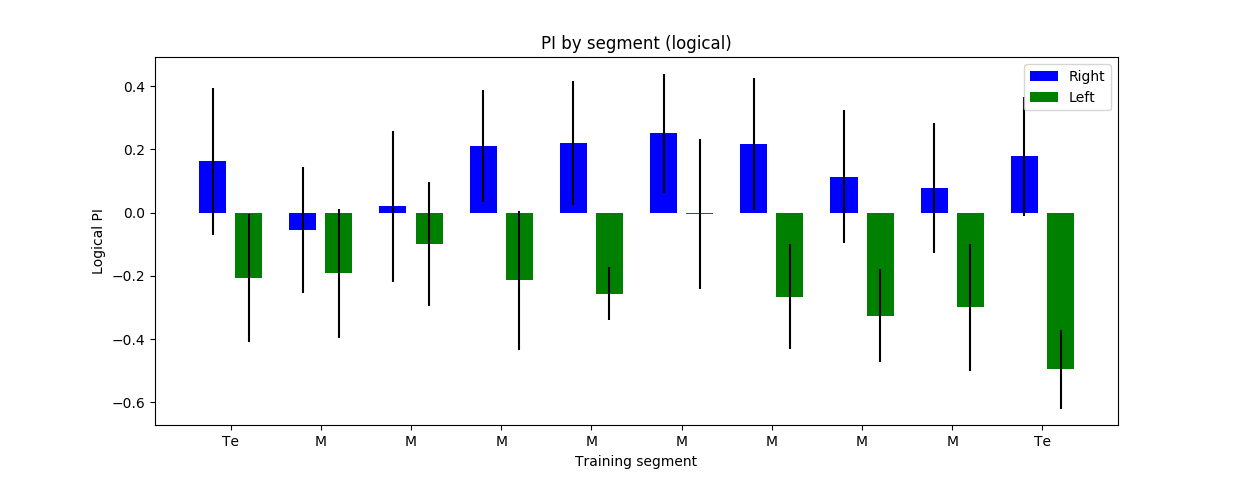
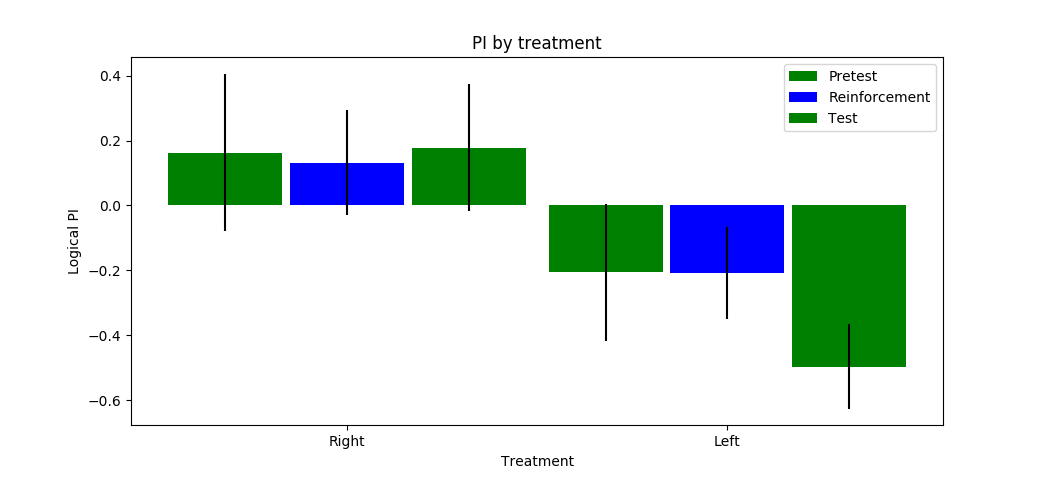
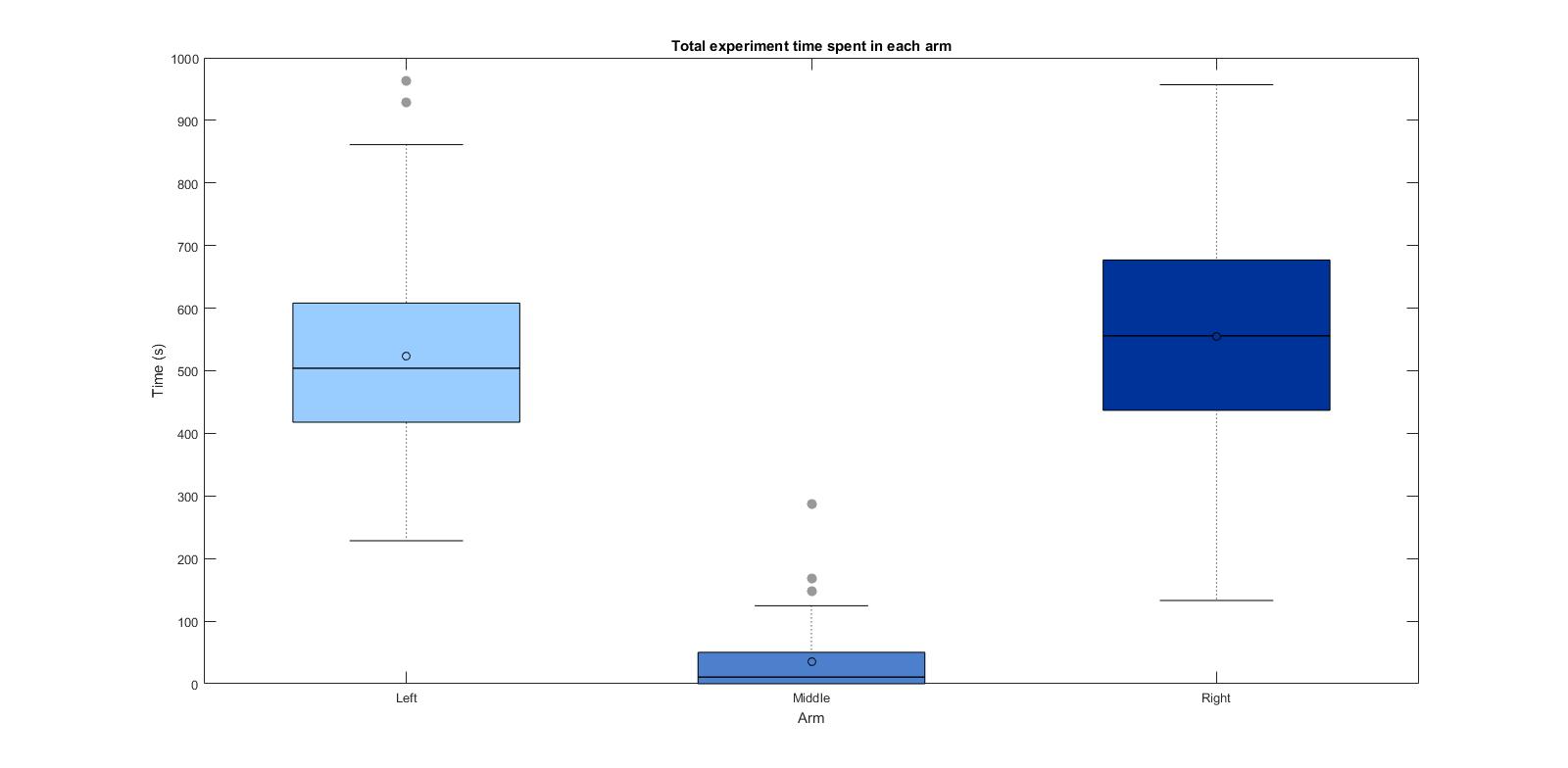
I have decreased the light intensity to around half of what it previously was. The result do not show any clear phenotype. The ‘logical PI’ looks kind of inverted because I actually have plotted it so that positive means light, negative means no light. A total of 30 flies were tested: some of them with right, other with left reinforcement
Category: neuronal activation, Operant reinforcment, Optogenetics, python code | No Comments
Writting the analysis for the joystick experiments with Gr28bd+TrpA1>Chrimson
on Monday, April 24th, 2017 1:49 | by Christian Rohrsen

Example of a trace within the different trainning/test segments
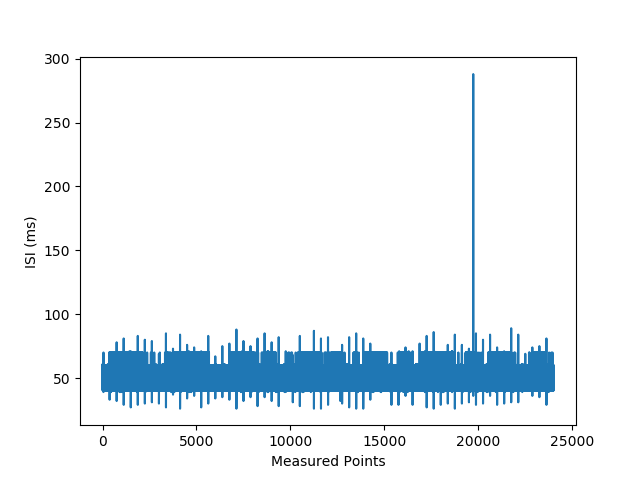
Inter sampling interval just to check
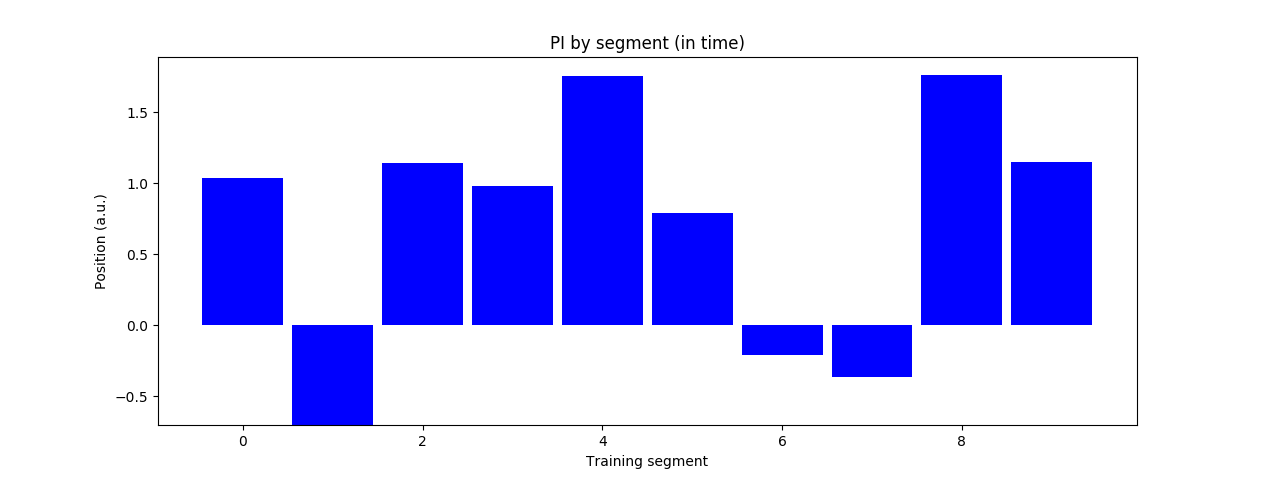
10 experiment segments with alternating no reinforcement/reinforcement
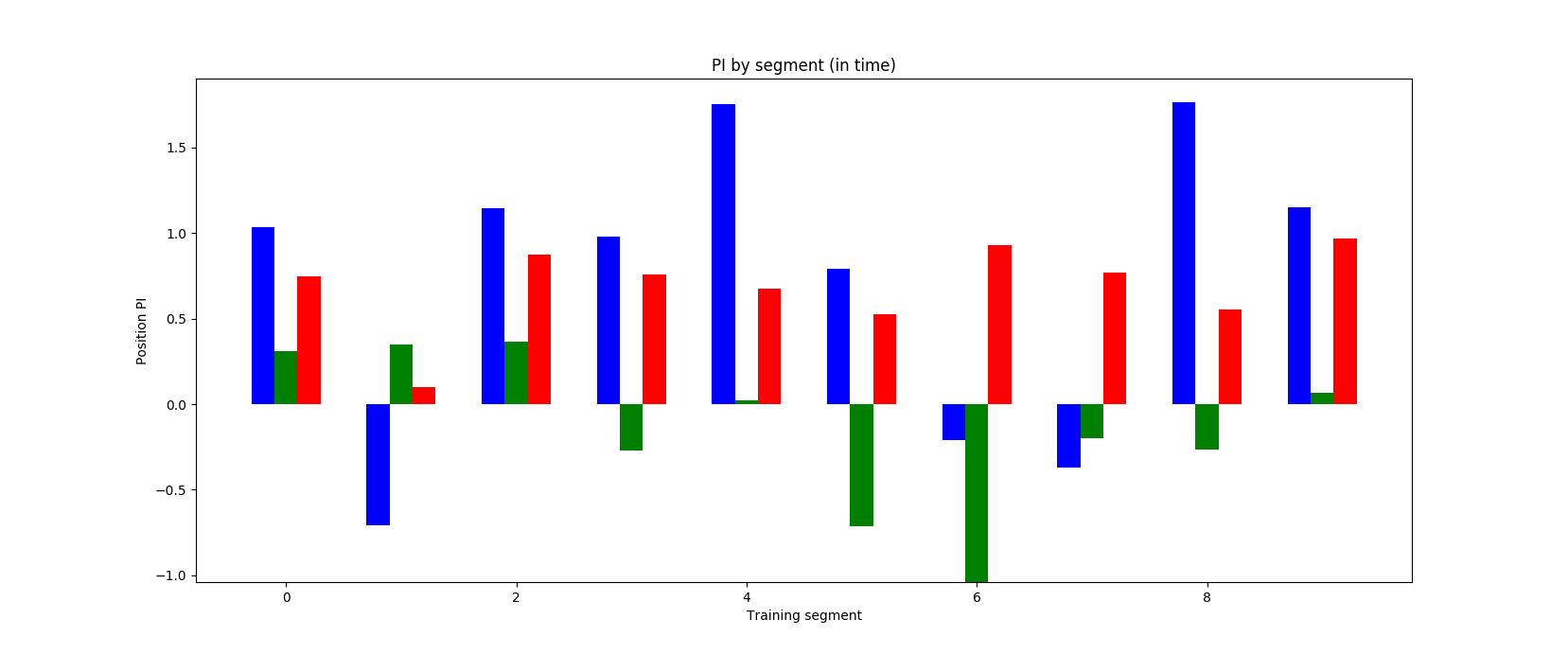
The same as above but for the 3 platforms that ran in the same batch
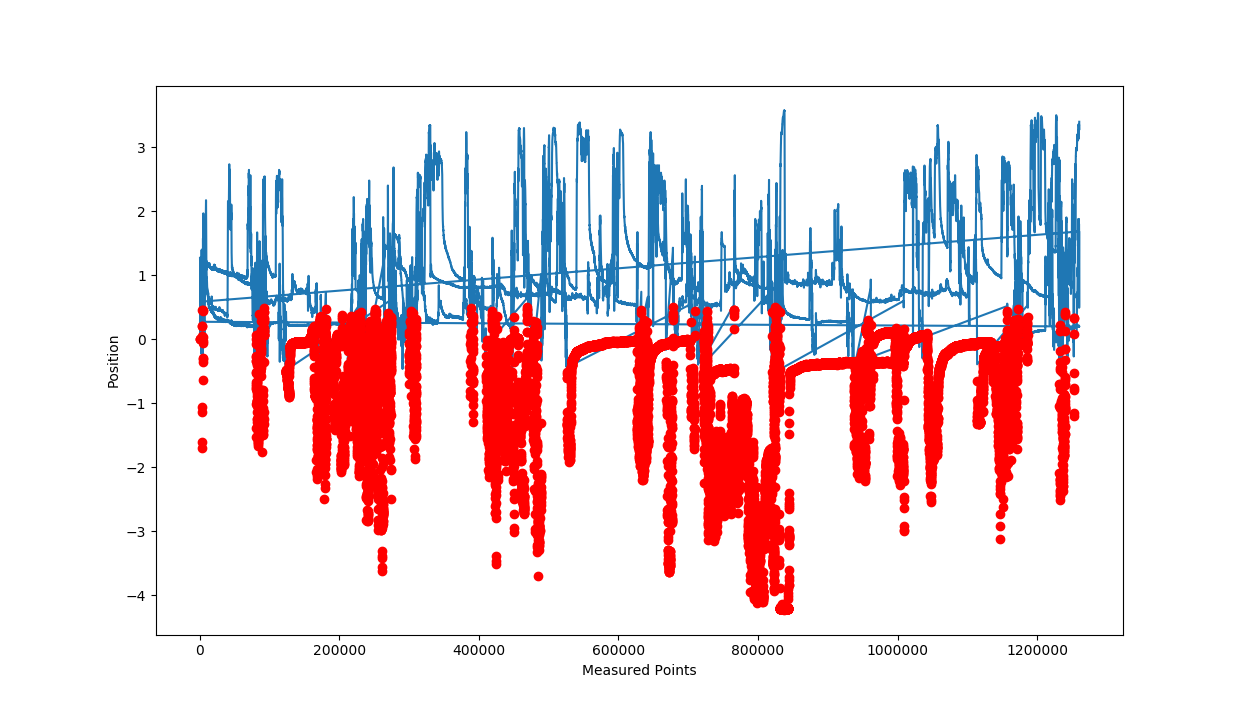 Trace dynamics when the light is ON (blue) and OFF (red). Working on nicer visualization in general
Trace dynamics when the light is ON (blue) and OFF (red). Working on nicer visualization in general
Category: neuronal activation, Operant reinforcment, Optogenetics, python code | No Comments
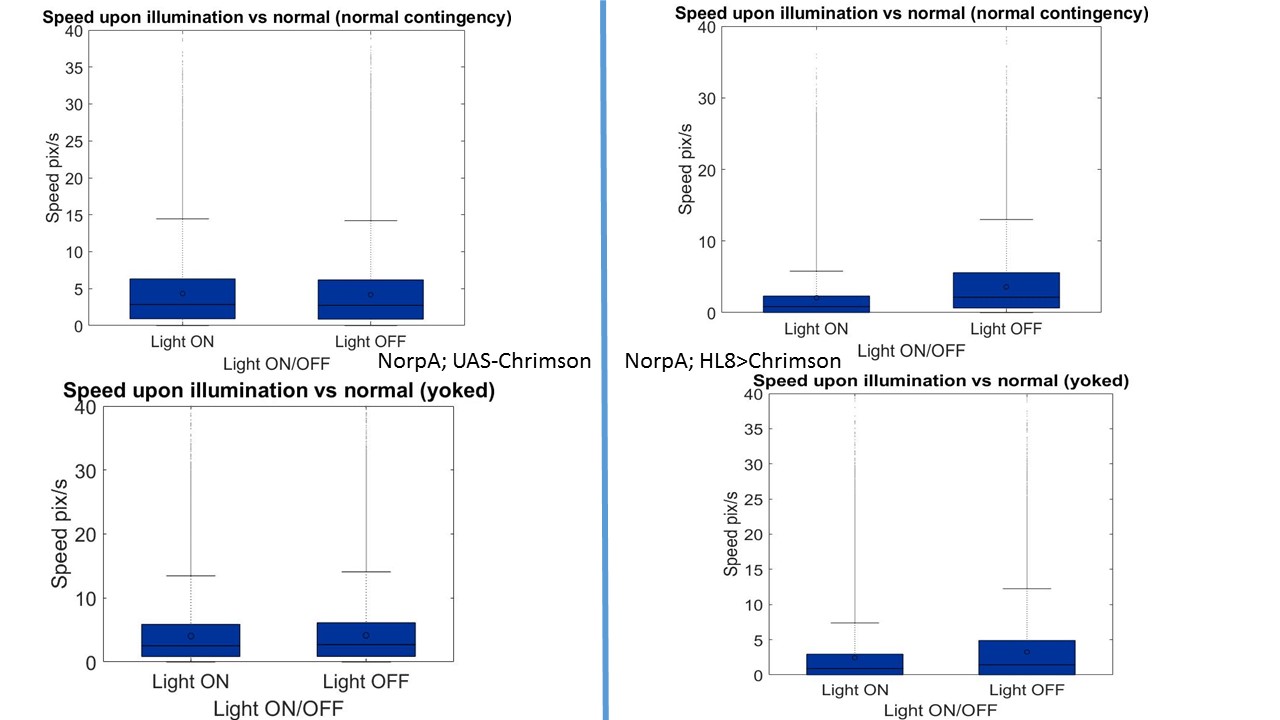
Locomotion when light is on vs off
on Monday, February 27th, 2017 12:43 | by Christian Rohrsen
Category: neuronal activation, Operant reinforcment, Optogenetics | No Comments
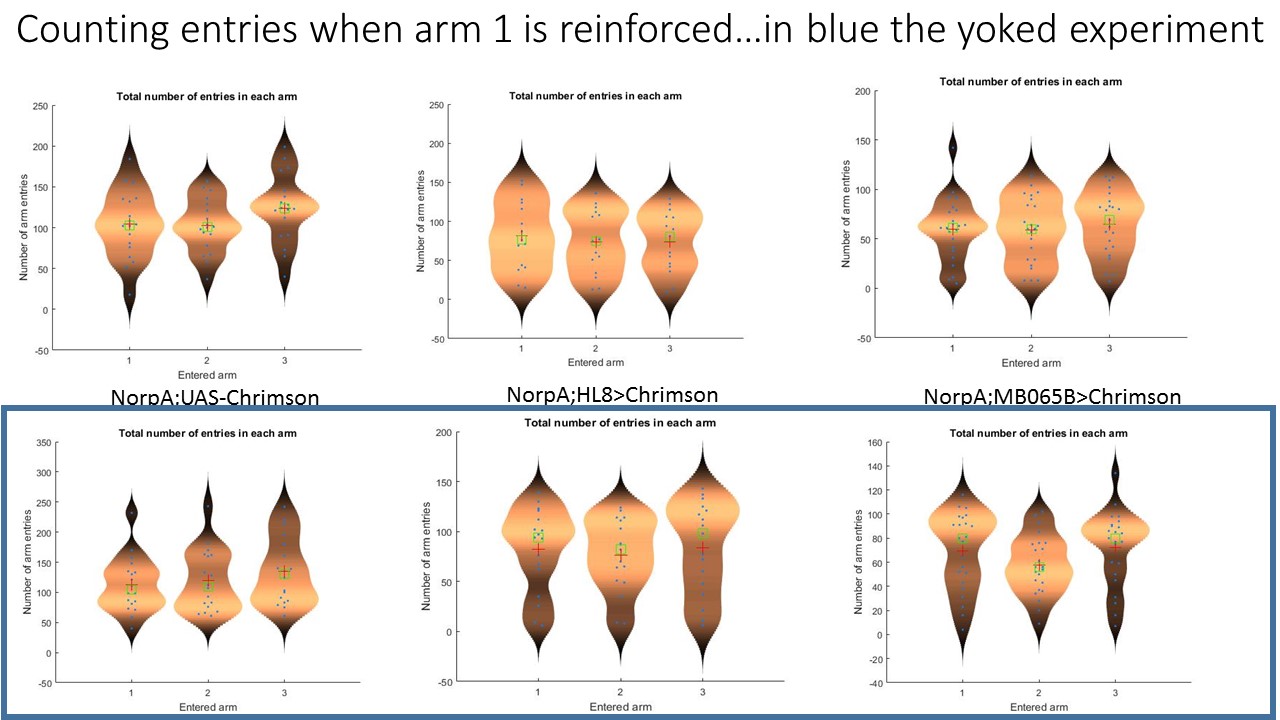
Yoked experiments analysis
on Monday, February 20th, 2017 2:46 | by Christian Rohrsen
Category: neuronal activation, Operant reinforcment, Optogenetics | No Comments
Yoked experiments analysis
on Monday, February 13th, 2017 2:47 | by Christian Rohrsen

Category: neuronal activation, Operant reinforcment, Optogenetics | No Comments
Modelling linearly the effect of the DANs on valence/speed and other metrics
on Thursday, October 13th, 2016 12:26 | by Christian Rohrsen
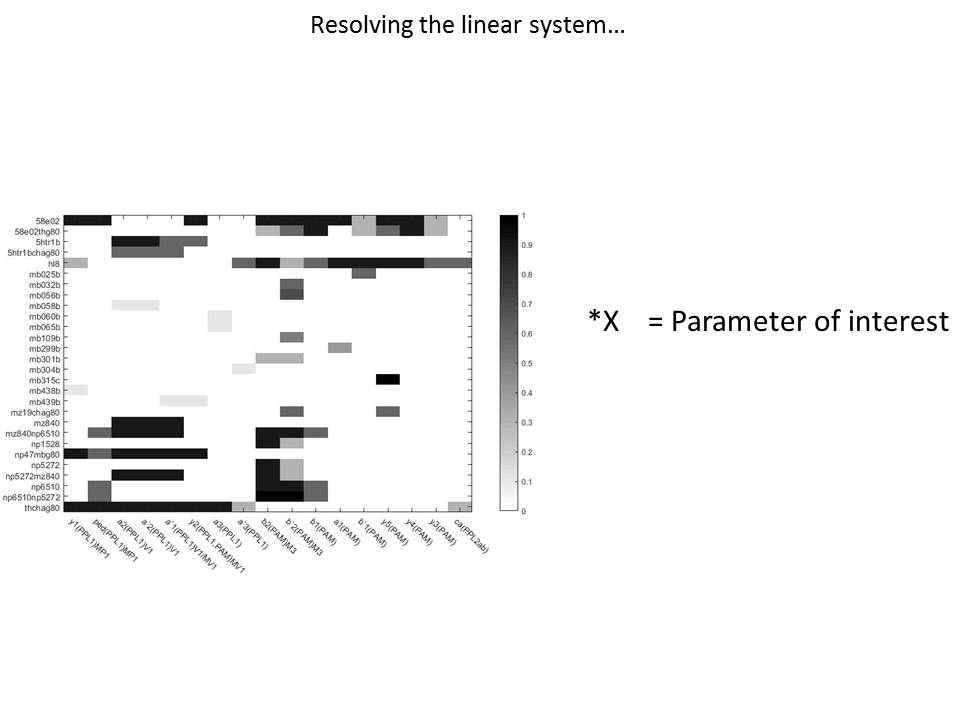
So this first picture shows graphically how I get the valences contributions for each of the dopaminergic clusters. On the Y-axis you see the lines I used for the modelling and on the x-axis the clusters. This is the expression pattern for all the drivers (split G4 and the dirtier G4s). I also made this expression pattern binary, to avoid the errors I could add by trying to estimate the expression intensity from the literature.
Here below are the results I obtained for one of the metrics. I wont explain to much here because the main result I see is that the results change drastically upon changes in the model. This tells me that there is something wrong there. Since making the expression table binary or weighted, or using a subset of the G4s used should not give me so random values for the dopaminergic clusters.
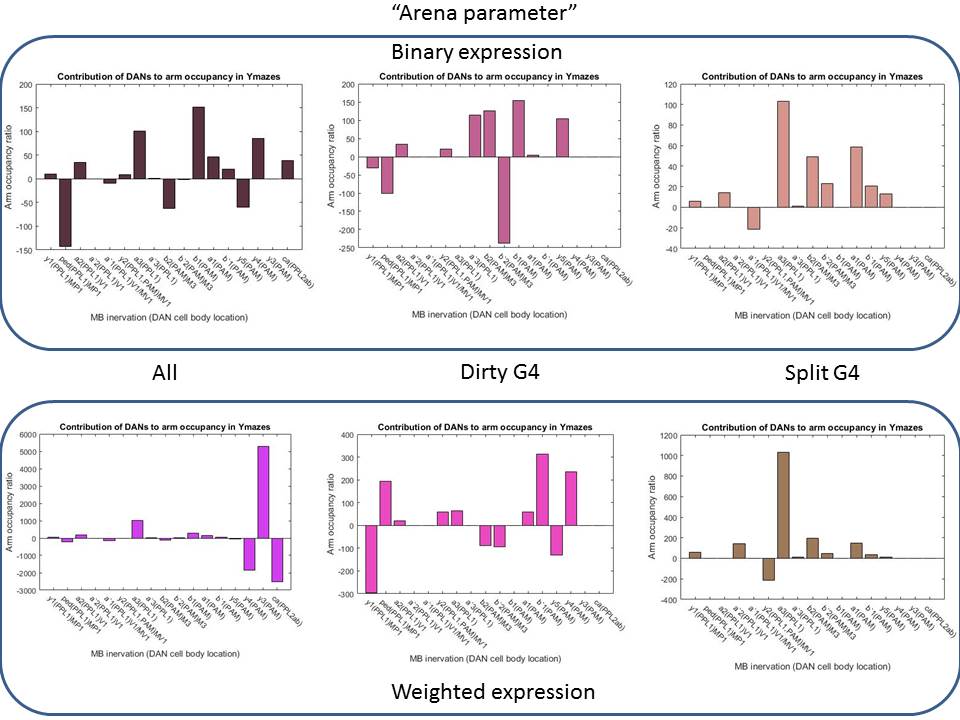
With this, I am quite stuck and do not know what to do next. Results seem not to show that much. Considering planning another experiment while there is time or continuing analyizing. Comments please!
Category: neuronal activation, Operant reinforcment, Optogenetics | 3 Comments
Screen results
on Sunday, September 4th, 2016 5:50 | by Christian Rohrsen
Category: neuronal activation, Operant reinforcment, Optogenetics | No Comments
Screen start
on Monday, August 1st, 2016 3:46 | by Christian Rohrsen
Hi guys,
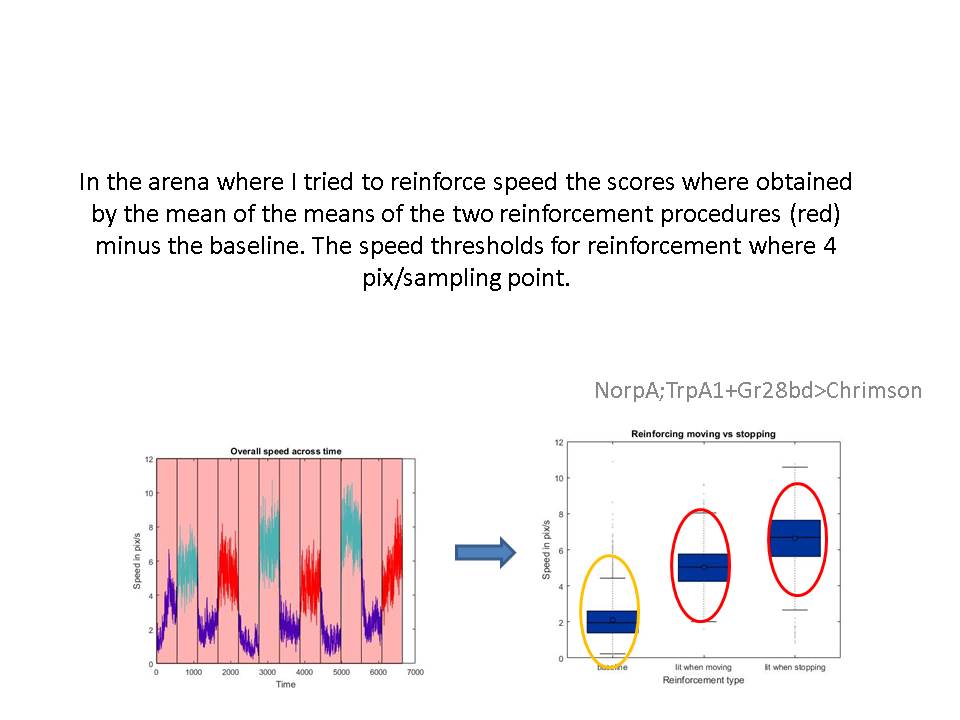
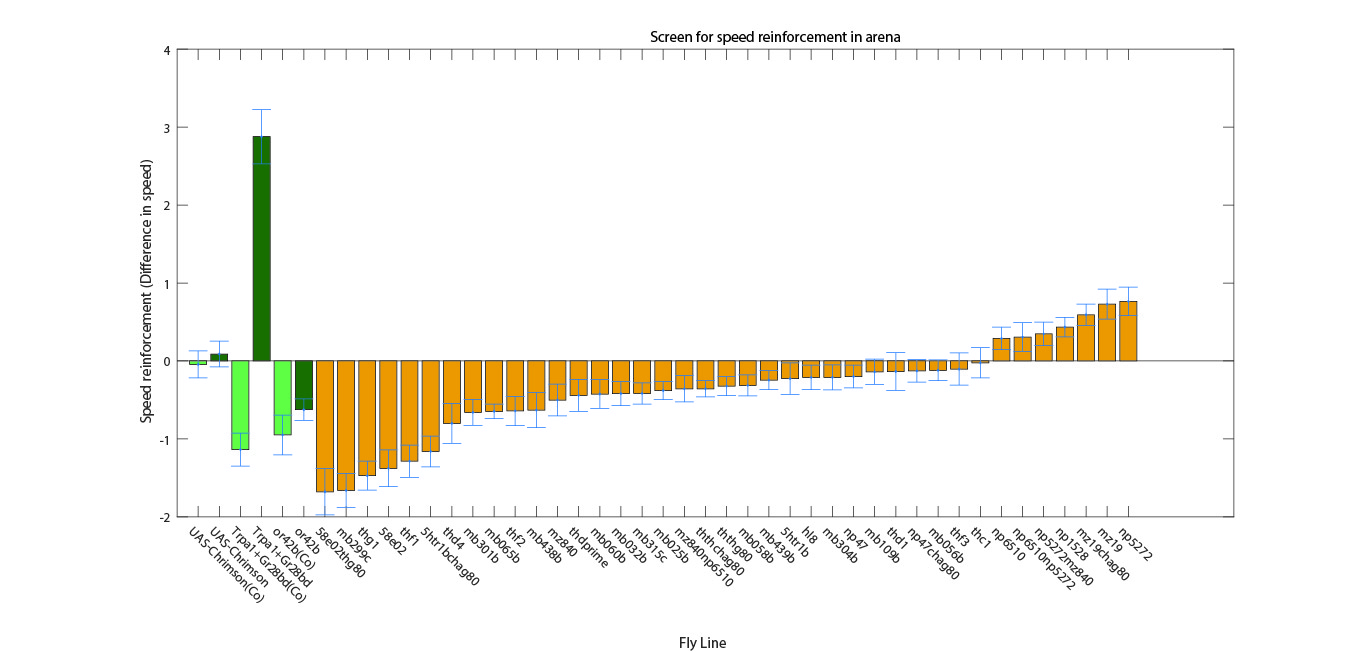
How are you? Quick update: I did manage to get the speed reinforcement to work. Thus, I will start the screen this week!
Category: neuronal activation, Operant reinforcment, Optogenetics | 1 Comment
Update
on Friday, July 1st, 2016 10:33 | by Christian Rohrsen
This is the same experiment as I previously showed of Gr66a>Chrimson (ATR). The only difference is that the light was on for the whole experiment, so that the flies could see the light before the entered the arm. Previously the light switched on once the fly went into the arm. The phenotype is much stronger (there is some classical component in it). I was trying to reinforce left or right turns but it does not seem to work after a bit trying out. It makes sense ecologically I think, that the right or left turns are not coupled to the reinforcement systems. I also have been thinking about the CS-US relation bitter taste-turn directions does not make sense ecologically, but maybe if instead of bitter, I apply pain or heat …it could work. I was thinking of reinforcing orientation as well as a speed threshold, or any other variants. What do you think? I would appreciate some ideas. Since I want to make sure about what am I measuring: operant/place/classical…