Control experiments
on Wednesday, March 20th, 2019 10:46 | by Anders Eriksson
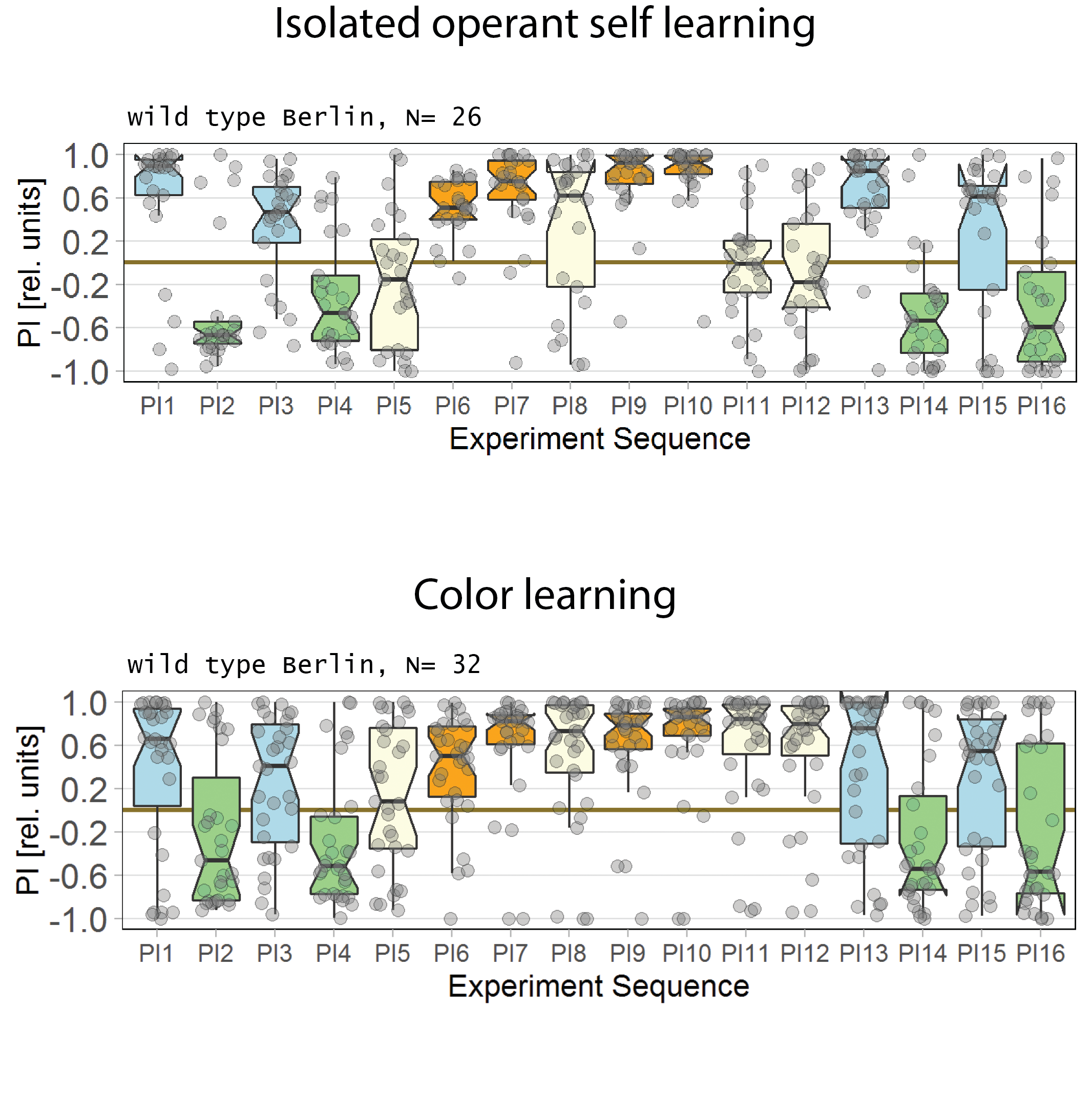
Been conducting a few control experiments to validate the “new” torque machine. Did a set of color learning and also isolated operant self learning. They do behave as expected. There is a small lumping together in the data the first period after the optomotor response in which the flies are in a neautral setting. It should be noted that it is a combined experiments of alternating right and left optomotor response. Also, the data in this figure is also a combination of the A/D converted “correctly” installed and “incorrectly”, i.e. inverted and reversed.

Category: flight, Lab, Memory, Operant learning, operant self-learning
Leave a Reply